| Главная » Статьи » Делись, советуй, обсуждай » Arduino проекты |
Робот, ездящий по линии под управлением Arduino
| Существует множество подходов для решения задачи следования по линии. Выбор одного из них зависит от конкретной конструкции робота, от количества сенсоров, их расположения относительно колёс и друг друга. В нашем примере будет собран робот на лёгкой платформе с двумя колёсами и двумя датчиками линии, расположенными на днище робота перед колёсами. В результате выглядеть он будет так: 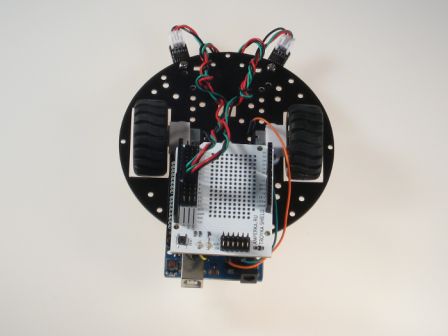 Что понадобится Для нашего примера понадобятся следующие детали: 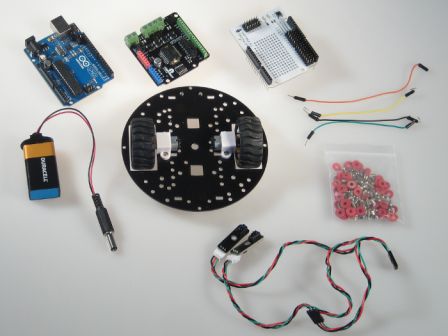 ◾ Arduino Uno ◾ Двухколёсная платформа miniQ ◾ Motor Shield ◾ Troyka Shield ◾ Пара датчиков линий ◾ Несколько соединительных проводов и болтов и гаек для крепления датчиков и Arduino Uno ◾ Кабель питания от батарейки Крона и сама батарейка Вообще говоря, лучше было бы использовать NiMH-аккумуляторы: они лучше отдают ток и значительно дольше держат напряжение, но для целей этого проекта одной батарейки на 9 В вполне хватило. Собираем робота Сначала соберём робота, установим всю механику и электронику. Собираем платформу Для начала прикрепим колёса к моторам. 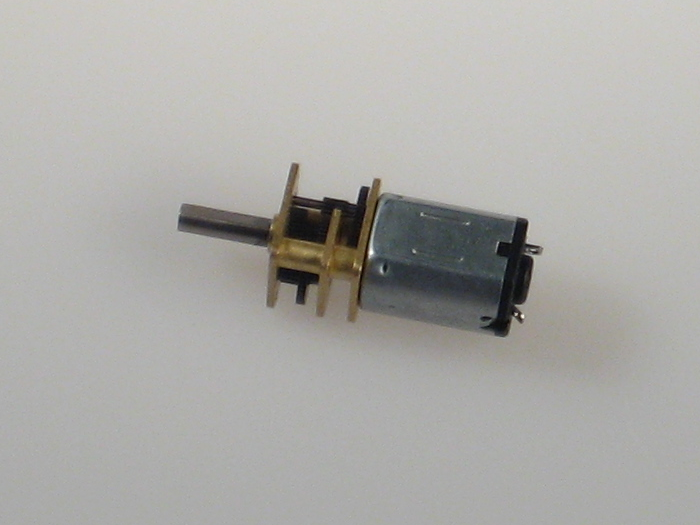  Затем с помощью пластиковых П-образных креплений прикручиваем моторчики к платформе. Обратите внимание на взаимное расположение крепления и моторчики: в креплении есть небольшие углубления, так что если всё соединить правильно, то моторчики будут крепко держаться и никуда не выскочат. 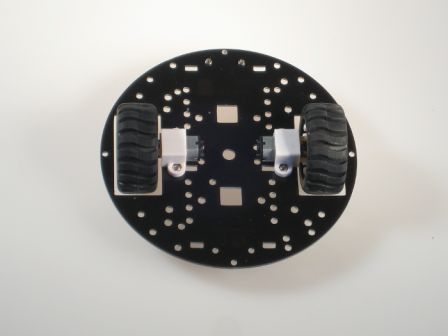 Теперь крепим балансировочный шар.  Отлично! Платформа собрана. Если вам кажется, что колёсам отведено слишком мало места и они трутся о платформу, то скорее всего вам нужно посильнее надавить на колёса, чтобы они плотнее сели на вал мотора. Крепим сенсоры Закрепим их, как показано на фото:  Можно было бы выбрать и другое место. Это могло бы сделать контроль проще или сложнее, а самого робота более или менее эффективным. Оптимальное расположение — вопрос серии экспериментов. Для этого проекта просто был выбран такой способ крепления. Крепим Arduino Arduino закрепим с противоположной стороны двумя винтиками и гайками. 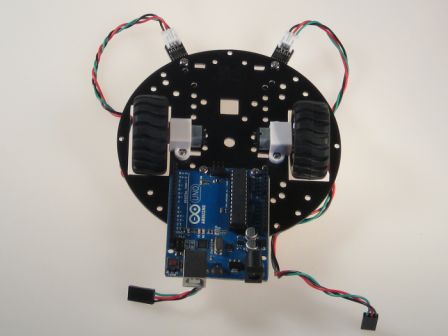 Опять же, можно выбрать и другое место. Например над колёсами, если приподнять Arduino на латунных стойках. Это изменило бы положение центра масс и повлияло бы на эффективность робота в лучшую или худшую сторону. Крепим Motor Shield и соединительные провода Установим Motor Shield на Arduino и подсоединим соединительные провода. Обратите внимание, чтобы соотвествовать программному коду из примера ниже, моторчики соединены с Motor Shield так: правый — к клеммам M1 с прямой полярностью (плюс к плюсу), а левый — к M2 с обратной (плюс к минусу). 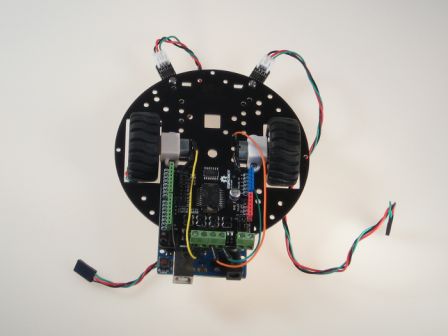 В этом проекте, для экономии времени концы соединительных проводов просто скручены с контактами моторов. При работе «начисто» стоит жёстко припаять провода к моторам. Крепим Troyka Shield Присоединяем сверху Troyka Shield и подключаем датчики к 8 и 9 цифровым контактам. В итоге получаем следующую конструкцию: 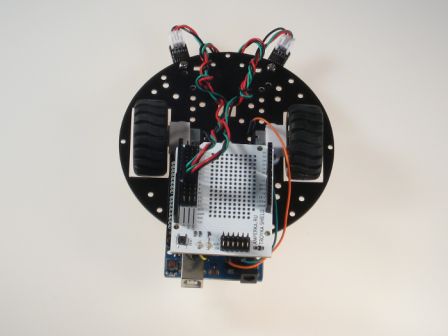 Программирование Теперь напишем программу, которая заставит собранную конструкцию двигаться по нарисованной линии. В проекте мы будем использовать чёрную линию, напечатанную на белых листах бумаги. Основная идея алгоритма Пусть у нас усть белое поле, и на нём чёрным нарисован трек для нашего робота. Используемые датчики линии выдают логический ноль, когда «видят» чёрное и единицу, когда «видят» белое. На прямой робот должен пропускать трек между сенсоров, то есть оба сенсора должны показывать единички. При повороте траектории направо, правый сенсор наезжает на трек и начинает показывать логический ноль. При повороте налево, ноль показывает левый сенсор. Таким образом получаем простую систему с тремя состояниями: ◾ STATE_FORWARD — нужно ехать вперёд ◾ STATE_RIGHT — нужно поворачиваться направо ◾ STATE_LEFT — нужно поворачиваться налево На вход системы поступает информация с сенсоров. Получаем следующую логику переходов: Левый Правый Целевое состояние 0 0 STATE_FORWARD 0 1 STATE_RIGHT 1 0 STATE_LEFT 1 1 STATE_FORWARD Реализация на Arduino Код // Моторы подключаются к клеммам M1+,M1-,M2+,M2- // Motor shield использует четыре контакта 6,5,7,4 для управления моторами #define SPEED_LEFT 6 #define SPEED_RIGHT 5 #define DIR_LEFT 7 #define DIR_RIGHT 4 #define LEFT_SENSOR_PIN 8 #define RIGHT_SENSOR_PIN 9 // Скорость, с которой мы движемся вперёд (0-255) #define SPEED 35 // Коэффициент, задающий во сколько раз нужно затормозить // одно из колёс для поворота #define BRAKE_K 4 #define STATE_FORWARD 0 #define STATE_RIGHT 1 #define STATE_LEFT 2 int state = STATE_FORWARD; void runForward() { state = STATE_FORWARD; // Для регулировки скорости `SPEED` может принимать значения от 0 до 255, // чем болше, тем быстрее. analogWrite(SPEED_LEFT, SPEED); analogWrite(SPEED_RIGHT, SPEED); // Если в DIR_LEFT или DIR_RIGHT пишем HIGH, мотор будет двигать соответствующее колесо // вперёд, если LOW - назад. digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void steerRight() { state = STATE_RIGHT; // Замедляем правое колесо относительно левого, // чтобы начать поворот analogWrite(SPEED_RIGHT, SPEED / BRAKE_K); analogWrite(SPEED_LEFT, SPEED); digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void steerLeft() { state = STATE_LEFT; analogWrite(SPEED_LEFT, SPEED / BRAKE_K); analogWrite(SPEED_RIGHT, SPEED); digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void setup() { // Настраивает выводы платы 4,5,6,7 на вывод сигналов for(int i = 4; i <= 7; i++) pinMode(i, OUTPUT); // Сразу едем вперёд runForward(); } void loop() { // Наш робот ездит по белому полю с чёрным треком. В обратном случае не нужно // инвертировать значения с датчиков boolean left = !digitalRead(LEFT_SENSOR_PIN); boolean right = !digitalRead(RIGHT_SENSOR_PIN); // В какое состояние нужно перейти? int targetState; if (left == right) { // под сенсорами всё белое или всё чёрное // едем вперёд targetState = STATE_FORWARD; } else if (left) { // левый сенсор упёрся в трек // поворачиваем налево targetState = STATE_LEFT; } else { targetState = STATE_RIGHT; } if (state == targetState) { // мы уже делаём всё что нужно, // делаем измерения заново return; } switch (targetState) { case STATE_FORWARD: runForward(); break; case STATE_RIGHT: steerRight(); break; case STATE_LEFT: steerLeft(); break; } // не позволяем сильно вилять на прямой delay(50); } Проблема инертности и её решение Однако если выставить скорость моторов побольше, мы столкнёмся со следующей проблемой: наш робот будет вылетать с трека, не успевая отреагировать на поворот. Это связано с тем, что наши моторчики не умеют тормозить мгновенно. В этом легко убедиться поставив следующий эксперимент: с заданной скоростью робот будет двигаться по поверхности, и в некоторый момент будет установлена нулевая скорость и измерен тормозной путь робота. Пусть робот разгоняется по монотонной поверхности и тормозится при фиксировании импровизированной стоп-линии. Эксперимент проведём для разных скоростей. Код программы для эксперимента таков: Код #define LEFT_SENSOR_PIN 8 #define RIGHT_SENSOR_PIN 9 #define SPEED_LEFT 6 #define SPEED_RIGHT 5 #define DIR_LEFT 7 #define DIR_RIGHT 4 // Для того чтобы убедиться, что именно тормозной путь долог, а не команда остановиться // приходит слишком поздно, будем включать светодиод, когда отдаётся команда. #define LED_PIN 13 int currSpeed = 40; void setup() { for(int i = 4; i <= 7; ++i) pinMode(i, OUTPUT); analogWrite(SPEED_RIGHT, currSpeed); digitalWrite(DIR_RIGHT, HIGH); analogWrite(SPEED_LEFT, currSpeed); digitalWrite(DIR_LEFT, HIGH); pinMode(LED_PIN, OUTPUT); } void loop() { if (currSpeed > 120) return; boolean white[] = { !digitalRead(LEFT_SENSOR_PIN), !digitalRead(RIGHT_SENSOR_PIN) }; if (white[0] && white[1]) { // едем пока не упрёмся return; } // зажигаем светодиод, останавливаем моторы // и наблюдаем digitalWrite(LED_PIN, HIGH); analogWrite(SPEED_RIGHT, 0); analogWrite(SPEED_LEFT, 0); delay(5000); // повторяем эксперимент, увеличивая скорость // на 10 пунктов currSpeed += 10; if (currSpeed > 120) return; digitalWrite(LED_PIN, LOW); analogWrite(SPEED_RIGHT, currSpeed); analogWrite(SPEED_LEFT, currSpeed); } На той поверхности, на которой проводился эксперимент, были получены следующие результаты: 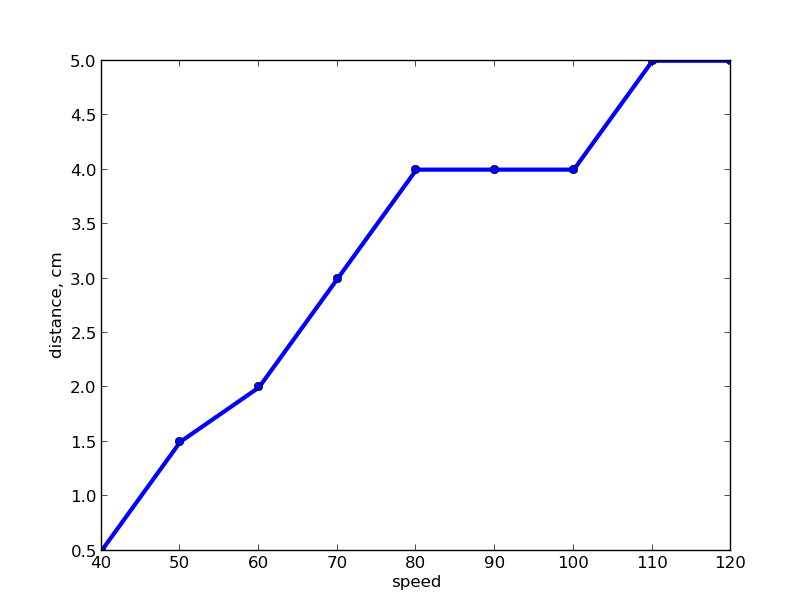 Таким образом, начиная с некоторого момента у нашего робота нет никакой возможности успеть среагировать и остаться на треке. Что можно сделать?! После того, как сенсоры улавливают поворот, можно остановиться и вернуться назад на некоторое расстояние, зависящее от скорости перед остановкой. Однако мы можем отдать команду роботу ехать с какой-то скоростью, но не можем приказать ему проехать какое-то расстояние. Для того, чтобы понять зависимость расстояния при заднем ходе от времени, был проведён ещё один замер: Код #define SPEED_LEFT 6 #define SPEED_RIGHT 5 #define DIR_LEFT 7 #define DIR_RIGHT 4 void go(int speed, bool reverseLeft, bool reverseRight, int duration) { analogWrite(SPEED_LEFT, speed); analogWrite(SPEED_RIGHT, speed); digitalWrite(DIR_LEFT, reverseLeft ? LOW : HIGH); digitalWrite(DIR_RIGHT, reverseRight ? LOW : HIGH); delay(duration); } void setup() { for(int i = 4; i <= 7; ++i) pinMode(i, OUTPUT); } void loop() { // Задержка 5 секунд после включения питания delay(5000); for (int i = 200; i <= 1000; i += 100) { // Несколько сотен мс вперёд go(50, false, false, 200); go(0, false, false, 0); // Задержка 5 секунд delay(5000); } // Остановка до ресета или выключения питания go(0, false, false, 0); // Приехали while (true) ; } На скорости 50, например, робот проделывал путь, зависящий от времени следующим образом: 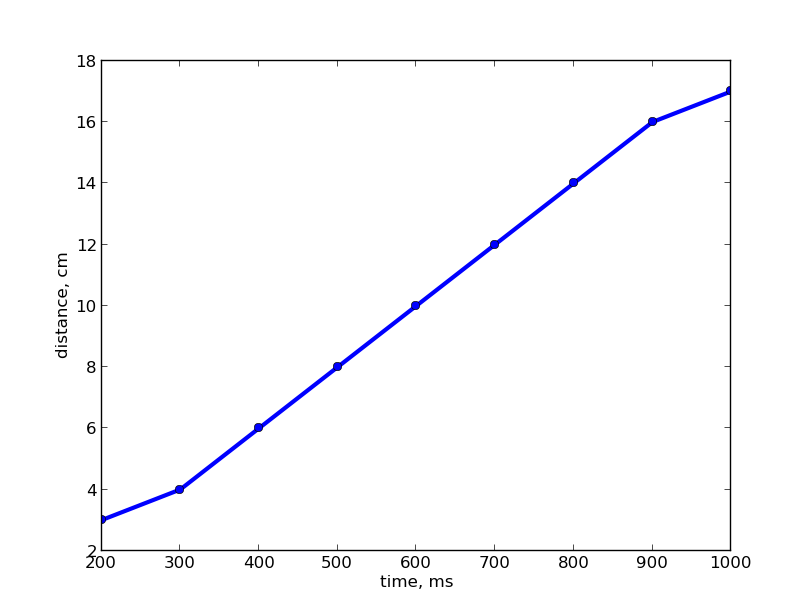 Полученные две зависимости были линейно аппроксимированы, затем была выведена формула зависимости времени, которое надо двигаться назад, от скорости перед остановкой. Обратим внимание на то, что у вас значения могут оказаться другими: из-за особенностей сборки либо из-за поверхности, поэтому в общем случае лучше провести все измерения самостоятельно. Адаптивное поведение Перед финальным экспериментом произведём ещё несколько поправок. Во-первых, нам необязательно давать команду ехать назад перед каждым поворотом, как мы помним, на маленькой скорости робот прекрасно справляется и без этого. К тому же лучше ему двигаться не прямо назад, а немного поворачивая, всё-таки робот находится перед поворотом. Во-вторых, нам стоит различать состояния робота: когда он движется по прямой, и ничто ему не мешает ускоряться; и когда робот входит в поворот. В первом случае действительно будем увеличивать скорость робота для более динамичного прохождения трека, во втором случае будем сбрасывать скорость до значения, достаточного для успешного прохождения поворота, и будем держать эту скорость ещё какое-то время. В итоге наш код будет выглядит следующим образом: Код // Моторы подключаются к клеммам M1+,M1-,M2+,M2- // Motor shield использует четыре контакта 6,5,7,4 для управления моторами #define SPEED_LEFT 6 #define SPEED_RIGHT 5 #define DIR_LEFT 7 #define DIR_RIGHT 4 #define LEFT_SENSOR_PIN 8 #define RIGHT_SENSOR_PIN 9 // Скорость, с которой мы движемся вперёд (0-255) #define SPEED 100 // Скорость прохождения сложных участков #define SLOW_SPEED 35 #define BACK_SLOW_SPEED 30 #define BACK_FAST_SPEED 50 // Коэффициент, задающий во сколько раз нужно затормозить // одно из колёс для поворота #define BRAKE_K 4 #define STATE_FORWARD 0 #define STATE_RIGHT 1 #define STATE_LEFT 2 #define SPEED_STEP 2 #define FAST_TIME_THRESHOLD 500 int state = STATE_FORWARD; int currentSpeed = SPEED; int fastTime = 0; void runForward() { state = STATE_FORWARD; fastTime += 1; if (fastTime < FAST_TIME_THRESHOLD) { currentSpeed = SLOW_SPEED; } else { currentSpeed = min(currentSpeed + SPEED_STEP, SPEED); } analogWrite(SPEED_LEFT, currentSpeed); analogWrite(SPEED_RIGHT, currentSpeed); digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void steerRight() { state = STATE_RIGHT; fastTime = 0; // Замедляем правое колесо относительно левого, // чтобы начать поворот analogWrite(SPEED_RIGHT, 0); analogWrite(SPEED_LEFT, SPEED); digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void steerLeft() { state = STATE_LEFT; fastTime = 0; analogWrite(SPEED_LEFT, 0); analogWrite(SPEED_RIGHT, SPEED); digitalWrite(DIR_LEFT, HIGH); digitalWrite(DIR_RIGHT, HIGH); } void stepBack(int duration, int state) { if (!duration) return; // В зависимости от направления поворота при движении назад будем // делать небольшой разворот int leftSpeed = (state == STATE_RIGHT) ? BACK_SLOW_SPEED : BACK_FAST_SPEED; int rightSpeed = (state == STATE_LEFT) ? BACK_SLOW_SPEED : BACK_FAST_SPEED; analogWrite(SPEED_LEFT, leftSpeed); analogWrite(SPEED_RIGHT, rightSpeed); // реверс колёс digitalWrite(DIR_RIGHT, LOW); digitalWrite(DIR_LEFT, LOW); delay(duration); } void setup() { // Настраивает выводы платы 4,5,6,7 на вывод сигналов for(int i = 4; i <= 7; i++) pinMode(i, OUTPUT); // Сразу едем вперёд runForward(); } void loop() { // Наш робот ездит по белому полю с чёрным треком. В обратном случае не нужно // инвертировать значения с датчиков boolean left = !digitalRead(LEFT_SENSOR_PIN); boolean right = !digitalRead(RIGHT_SENSOR_PIN); // В какое состояние нужно перейти? int targetState; if (left == right) { // под сенсорами всё белое или всё чёрное // едем вперёд targetState = STATE_FORWARD; } else if (left) { // левый сенсор упёрся в трек // поворачиваем налево targetState = STATE_LEFT; } else { targetState = STATE_RIGHT; } if (state == STATE_FORWARD && targetState != STATE_FORWARD) { int brakeTime = (currentSpeed > SLOW_SPEED) ? currentSpeed : 0; stepBack(brakeTime, targetState); } switch (targetState) { case STATE_FORWARD: runForward(); break; case STATE_RIGHT: steerRight(); break; case STATE_LEFT: steerLeft(); break; } } Результат Что дальше? Представленный алгоритм оставляет множество возможностей для улучшения и оптимизации. Скорость поворота можно так же менять адаптивно. Можно добавить контроль заноса. Можно поиграть с расположением сенсоров и центром масс. В конце концов можно получить непобедимого на треке робота. Нет ничего лучше, чем обставить оппонента на секунду-другую. Источник: http://wiki.amperka.ru/%D1%80%D0%BE%D0%B1%D0%BE%D1%82%D0%BE%D1%82%D0%B5%D1%85%D0%BD%D0%B8%D0%BA%D0%B0:%D1%80%D0%BE%D0%B1 | |
| Просмотров: 2759 | | |
| Всего комментариев: 0 | |